สำหรับโปรโตคอล EtherCAT นั้นจะมีสิ่งที่เรียกว่า State อยู่ ซึ่ง State ต่างๆ ที่ทำงานภายในโปรโตคอลจะบอกถึงสถานะและความพร้อมในการรับส่งข้อมูลชนิดต่างๆ ภายใน EtherCAT ได้
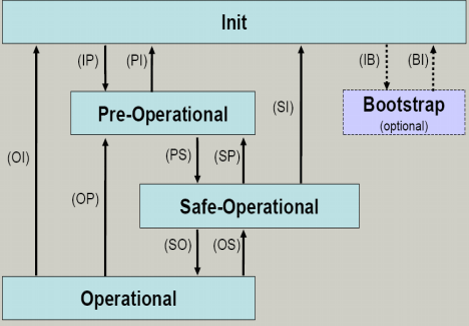
สำหรับ EtherCAT จะมี State การทำงานหลักๆ อยู่ 4 State ได้แก่
- Init State
Init State เป็น State เริ่มต้นหลังจากเปิดตัว EtherCAT Slave สำหรับ State นี้จะไม่มีข้อมูลในการสื่อสารใดๆ ผ่านนอกเหนือจากค่าเริ่มต้นในการกำหนดการสื่อสารแบบ Mailbox Communication - Pre-Operational State (Pre-Op)
เป็น State ที่อยู่ระหว่าง Init State และ Safe-Operational โดยใน State นี้จะทำการตรวจสอบว่าค่าเริ่มต้นสำหรับ Mailbox Communication ได้ทำการตั้งค่าเริ่มต้นจาก Init State เอาไว้อย่างถูกต้องหรือไม่ สำหรับ State นี้จะสื่อสารได้เฉพาะแบบ Mailbox Communication เท่านั้น - Safe-Operational State (Safe-Op)
สำหรับ State นี้จะมีการเช็คตัว Sync Manager สำหรับการรับส่งข้อมูลแบบต่างๆ สำหรับ State นี้จะสื่อสารได้ทั้งแบบ Mailbox Communication และ Process Data แต่ค่าภายใน Process Data ค่าจะมีการอัปเดทเฉพาะในฝั่ง Input Data เท่านั้น - Operational State
ภายใน Operational State จะสื่อสารได้ทั้งแบบ Mailbox Communication และ Process Data โดยจะสามารถใช้ได้ทั้งฝั่ง Output และ Input
นอกเหนือจากนี้ ยังมี State พิเศษอีก 1 State ก็คือ Bootstrap State สำหรับ State นี้นั้นจะมีการใช้งานหรือไม่นั้น ขึ้นอยู่กับการพัฒนาตัวเฟิร์มแวร์สำหรับใช้งาน EtherCAT Slave แต่ละตัว
Bootstrap State เป็น State ที่สามารถใช้งาน Mailbox Communication ผ่าน File access over EtherCAT Protocol (FoE) ได้ โดยเป็น State พิเศษที่จะทำให้สามารถอัปเดทเฟิร์มแวร์ของอุปกรณ์ EtherCAT Slave ได้ผ่านภายในเครือข่ายที่มีการเชื่อมต่ออยู่นั่นเอง